ものづくりフェアにてobniz利用作品「IoTデリバリーボックス」が文部科学大臣賞を受賞

ものづくりフェアにてobniz利用作品「IoTデリバリーボックス」が文部科学大臣賞を受賞

obnizのサービスに障害が発生いたしました。現在は復旧しています。ご利用のお客様にご不便をおかけいたしましたことお詫び申し上げます。詳細は以下をご確認ください。 発生時刻:2023/3/30 17:43頃(JST)復旧…
2023年4月11日(火)0:00~5:00 、サーバーのメンテナンスを行います。

当社は、2023年4月5日(水)〜4月7日(金)に東京ビッグサイトで開催される「第32回 Japan IT Week 春」に初出展いたします。

法人向けのIoTソリューション「obniz for Business」の提供を2023年3月より正式にスタートいたしました。
obnizの提供するIoTプラットフォーム「obniz(オブナイズ)」とエレクトロニクス商社丸文株式会社が販売する⼈数カウントアルゴリズムを内部に有するAIカメラ「Talia(タリア)」の連携を開始しました
いつもobnizをご利用いただき、誠にありがとうございます。 下記の日程でサーバメンテナンスを実施いたします。 【メンテナンス予定日時】 2023年2月15日(水)0:00~5:00 ※メンテナンス時間は前後する場合があ…
2022年-2023年、年末年始の休業についてのお知らせです。
2022年12月6日(火)0:00~5:00 の間、サーバーメンテナンスのため一部機能をご利用いただけません。

obnizOS 4.1.0をリリースしました。本日より、最新OSのアップデートがご利用いただけます。対象OSなど詳細は記事をご確認ください。
この度、サイボウズ株式会社、ソニーマーケティング株式会社と3社合同で『手軽でも効果抜群!IoTで業務改善コンテスト2022」を2022年9月28日(水)より開催いたします。

8月23日に発表いたしました、当社のシリーズBの資金調達についてメディアに掲載いただきましたので、お知らせいたします。
obniz.js 3.23.0をリリースしました。BLE関連の機能改善および対応パーツの追加を行いました。

2022年9月3日(土)~4日(日)に東京ビッグサイトで開催されるMaker Faire Tokyo 2022(メイカーフェア東京2022、以下 MFT2022)に、協賛すると共に2日間にわたりブースを出展します。
株式会社obnizは、シリーズBラウンドとなる資金調達を2022年7月29日に完了したことをお知らせします。

obnizのIoTゲートウェイ「obniz BLE/Wi-Fi Gateway Gen2.0」の発売を開始いたしました。
株式会社obnizは2022年8月19日付けでobnizCloudサービス説明書を一部変更します。
2022年7月28日(木)、ソラコム様主催の会場開催イベント「IoT Solution Day」に出展いたします。 約3年ぶりのオフライン開催のイベントです。直接話をお聞きになりたい方、デモや製品をご覧になりたい方はぜひ…
2022年7月27日(水)16時よりウェビナーを開催します。 テーマは「obnizで今からはじめる建設DX -IoTを活用して現場の課題を解決-」。セミナーについて詳しくは記事をご確認ください。

現行の「obniz BLE/Wi-Fi Gateway」は在庫限りで販売を終了し、2022年8月より後継機として「BLE/Wi-Fi Gateway Gen2.0」を発売いたします。
ゴールデンウィーク期間中の商品の出荷、お問い合わせ対応についてお知らせします。
obnizのサービスに障害が発生いたしました。現在は復旧しています。ご利用のお客様にご不便をおかけいたしましたことお詫び申し上げます。詳細は以下をご確認ください。 発生時刻:2022/4/14 15:37(JST)復旧時…
「M5StickC[obnizクラウド無料ライセンス付属]」および「obniz BLE/Wi-Fi Gateway」の販売を終了いたします。
(2022年3月28日 18:40更新) obnizのサービスに障害が発生し、当日中に復旧いたしました。ご利用のお客様にご不便をおかけいたしましたことお詫び申し上げます。詳細は以下をご確認ください。 発生時刻:2022/…
「Sensing Kit」「CO2モニタリングシステム」について、販売を終了いたします。

株式会社HitBit 2021年12月18日、宇都宮市大谷町特産「大谷石」の採石場跡で、車に乗ったまま映画を楽しめるドライブインシアターが開催されました。このイベントの中で、非接触・密回避をテーマに、obnizを用いたト…
obniz BLE/LTEゲートウェイが、東京都のコロナ自宅療養者のSpO2値遠隔監視システムの通信用ゲートウェイとして採用されました。
企業のIoT化を低価格で簡単に実現できるIoTサービス「Sense Connect(センスコネクト)」の第2弾、「Sense Connect for 環境可視化」を2022年1月25日から提供を開始します。
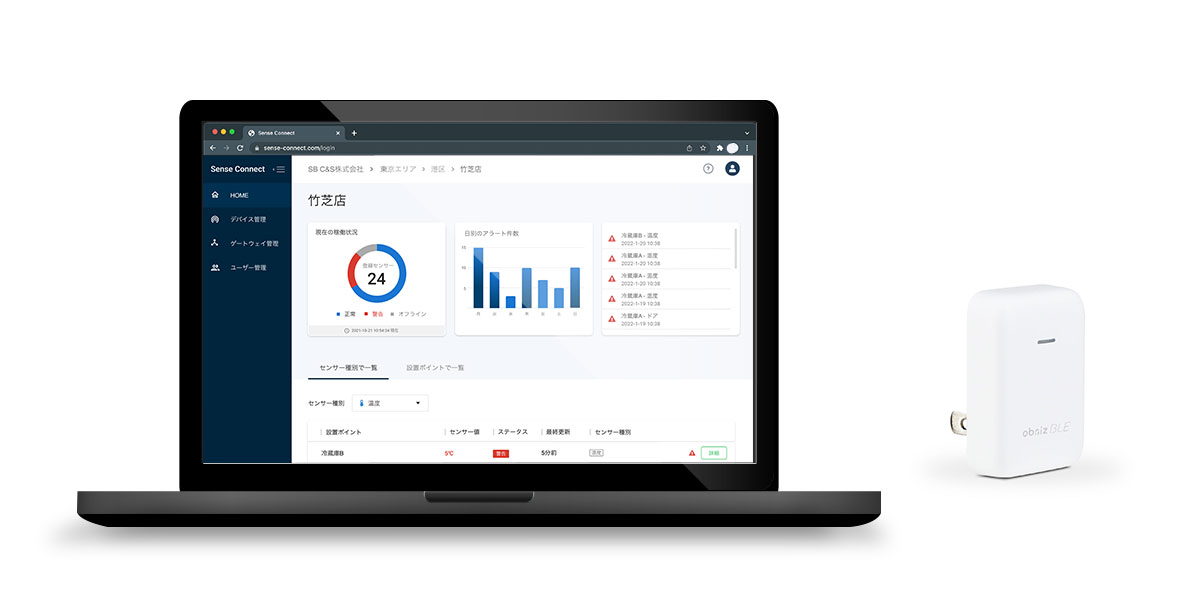
obnizとSB C&S株式会社は、デバイスやサービスをパッケージにしたセンサーソリューションで、企業のIoT化を低価格で簡単に実現できるIoTサービス「Sense Connect(センスコネクト)」を共同開発しました。
2022年1月5日の『news23 新春スペシャル第2夜「AIの功罪」』にて、弊社のBLE/Wi-Fiゲートウェイが採用された愛玩動物コミュニケーションプラットフォームサービス「waneco(ワネコ)」が紹介されました。
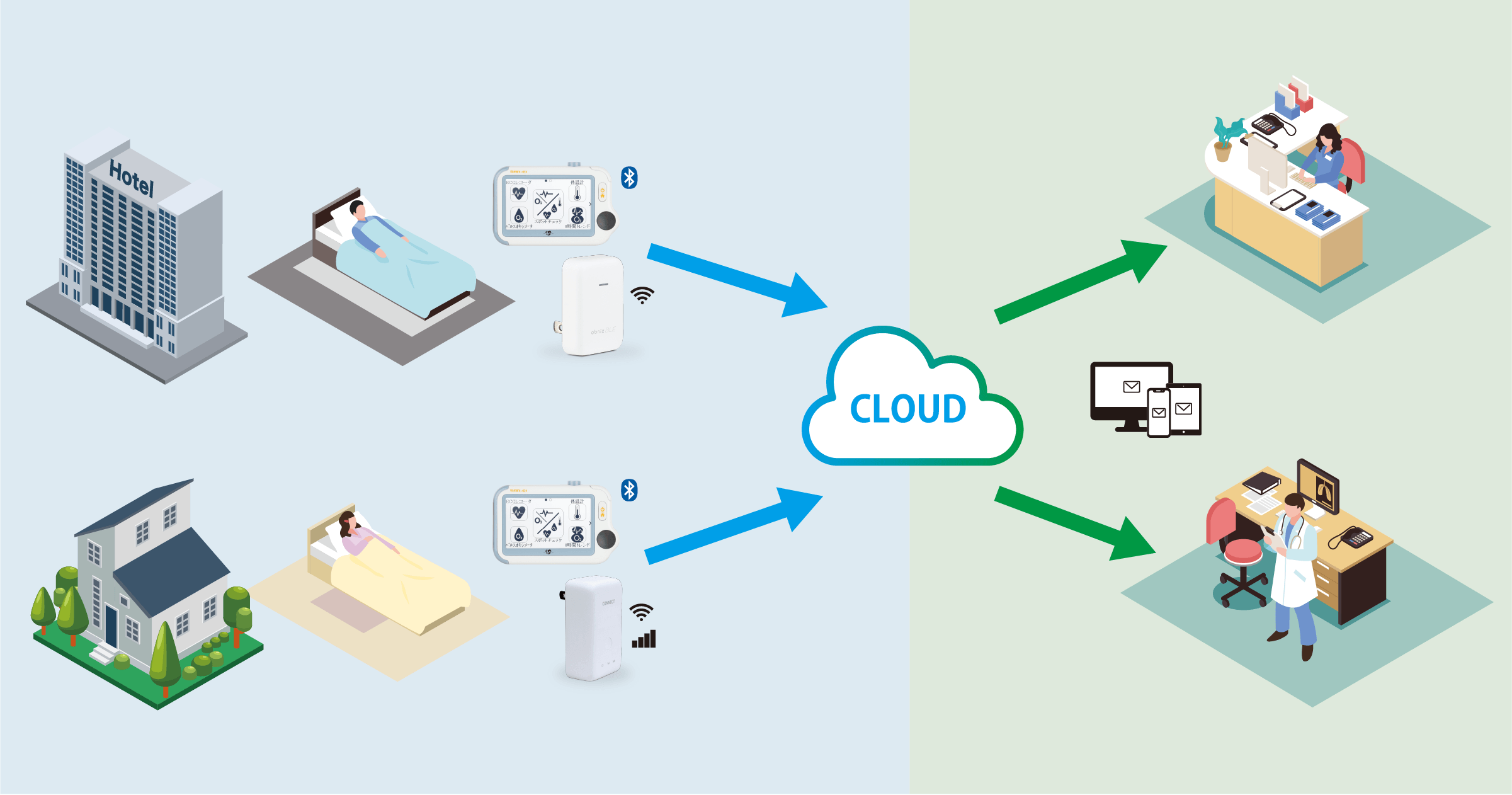
三栄メディシス株式会社が提供する「パルスオキシメータ連続遠隔監視システム」にobnizのBLEゲートウェイシリーズが採用されました。
2021/12/29 に発生した障害情報
obniz.js 3.18.0をリリースしました。合わせて、商品や新機能のリリースなど新着情報をまとめてお届けします。

obnizクリスマスプレゼント企画として、Twitterでキャンペーンを開催します。
2021年-2022年、年末年始の休業についてのお知らせです。
2021年11月のリリース情報をお届けします。ヘルプセンターのリニューアル、ドキュメントへの検索窓の追加など。